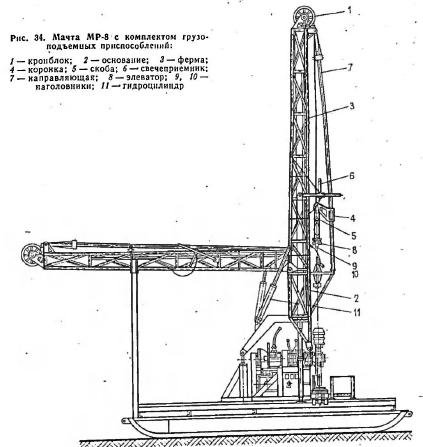
Мачта МР-8 с комплектом грузоподъемных приспособлении
Мачта МР-8 с комплектом грузоподъемных приспособлений (рис. 34) входит в комплекс буровой установки УКБ-50/100 и предназначена для проведения спуско-подъемных операций без участия верхового рабочего при бурении вертикальных и наклонных скважин от 90 до 70° к горизонту.
Мачта с комплектом грузоподъемных принадлежностей принята к серийному производству совместно с буровой установкой УКБ-50/100.


Ферма 3 (см. рис. 34) представляет собой сварную пространственную металлическую конструкцию. Передняя грань фермы смещена на 40 мм внутрь относительно передних стоек, что дает возможность элеватору более свободно перемещаться вдоль фермы, не касаясь ее поясов.
Передние и задние стоики фермы выполнены из угольников 40х40х4, раскосы и пояса-из угольников 36х36х4.
К верхнему поясу фермы крепится кронблок 1 и конечный выключатель КУ-705 с отвесом, предотвращающий переподъем элеватора с кареткой.
Основание 2 выполнено в виде цельносварной металлической конструкции, передние стойки которой шарнирно соединяются с поворотным фланцем вращателя станка, а задние — со специальным шарниром, вращающимся соосно с поворотным фланцем.
Таким образом, основание и мачта вместе с вращателем центруются только один раз при сборке на заводе и в дальнейшем поворачиваются совместно с вращателей вокруг продольной оси станка для бурения наклонных скважин.
К верхнему поясу основания с помощью шарниров и откидных болтов крепится нижний пояс фермы.
Поворот мачты МР-8 (рис. 35) вместе с вращателем на требуемый угол бурения скважины осуществляется подкосом 1, который одним концом соединен с основанием мачты, а другим — с платформой установки.
Подкос выполнен в виде винтового домкрата и предназначен для поворота мачты на требуемый угол бурения скважины и для придания ей устойчивого положения. Привод подкоса осуществляется с помощью рукоятки, максимальное усиление на которой не превышает 10 кгс.
Опускание фермы в транспортное положение производится вокруг шарниров, обеспечивающих опускание фермы в транспортное положение к перпендикулярной плоскости бурения скважины.

Опускание (подъем) фермы в транспортное (рабочее) положение производится гидроцилиндром 11 (см. рис. 34), шарнирно соединенным с основанием мачты и фермой. В транспортном положении ферма крепится к опоре.
К кронштейну основания и к кронблочной раме фермы шарнирно крепится направляющая 7, по которой перемещается каретка 4.
На верхнем конце направляющей размещена и может свободно перемещаться по направляющей втулка-отвес, которая с помощью троса подвешена к рычагу конечного выключателя КУ-705. При подъеме каретки выше определенного уровня, последняя увлекает за собой отвес, а контргруз поворачивает рычаг конечного выключателя и отключает привод станка.
Верхний конец направляющей крепится к кронблочной раме в плоскости наклона оси скважины, а крепление нижнего конца смещено от этой плоскости на 350 мм в сторону от передних стоек мачты, по с сохранением расстояния от оси скважины до оси направляющей. С целью сохранения неизменным расстояния от оси скважины до оси направляющей по всей ее длине последняя выполнена с величиной прогиба, равной 100 мм.
Такое конструктивное исполнение направляющей необходимо для автоматического смещения с осп скважины опускающегося порожнего элеватора с кареткой и исключения возможных ударов по вращателю элеватором при бурении наклонных скважин, так как на установке УКБ-50/100 освобождение устья скважины для проведения спуско-подъемных операций производится не отодвиганием бурового станка, а откидыванием вращателя в сторону.
Вместе с этим дугообразная направляющая совместно со скобой, элеватором и кареткой обеспечивает центрирование верхнего конца бурильной трубы по оси скважины, что позволяет улучшить условия свинчивания и развинчивания резьбовых соединений бурильных труб и, следовательно, увеличить срок службы их.
На высоте около 4 м от пола платформы к ферме мачты крепится свечеприемник 6, который выполнен из трубы и образует замкнутый многоугольник вокруг оси скважины. Свечеприемник соединен с фермой мачты пальцами, вокруг которых может свободно поворачиваться. В рабочее и транспортное положения свечеприемник устанавливается под действием силы тяжести и удерживается в этих положениях канатами.
Каретка 4 предназначена для центрирования верхнего конца свечи по оси скважины при свинчивании-развинчивании а также для направления и смещения с оси скважины элеватора, опускающегося к устью скважины.
Каретка (рис. 36) выполнена из двух щек 1, соединенных между собой пальцами. С одной стороны каретка оснащена тремя роликами 2 для перемещения по направляющей, с другой стороны конусной ловушкой 3 с двумя направляющими роликами 4.

Ролики 4, расположенные снизу и сверху конусной ловушки, предназначены для направления и облегчения заведения конуса скобы в ловушку, а также для исключения возможных случаев трения каната по внутренней поверхности конусной ловушки. Каретка имеет возможность перемещаться вдоль направляющей и поворачиваться вокруг нее.
Поэтому при спуско-подъеме бурильной колонны ось конусной ловушки всегда перемещается по оси скважины. При опускании порожнего элеватора к устью скважины (при наклонном бурении) каретка под действием силы тяжести перемещается вслед за элеватором и, стремясь занять отвесное положение, смещает последний с оси скважины.
На высоте 2 м от платформы буровой установки каретка доходит до кронштейна, крепящего нижний конец направляющей, и останавливается. Скоба с элеватором выходит из конусной ловушки каретки и продолжает свободно опускаться на платформу буровой установки. Предусмотренная возможность быстрого (автоматического) соединения и отсоединения скобы от каретки на высоте 2 м необходима для проведения спусков, подъемных и других вспомогательных операций, а именно: вынос из буровой и затаскивание колонкового набора; выполнение спуско-подъемных операций «на вынос»; надевание элеватора на свечу, стоящую на подсвечнике; подтаскивание обсадных труб, лежащих на мостках, и проведение обсадки скважины и т. п.

Скоба (рис. 37) выполняет роль соединительного звена между талевым канатом и элеватором.
Верхняя часть корпуса 1 выполнена в виде усеченного конуса, соразмерного с конусом конусной ловушки каретки. Нижняя часть корпуса выполнена в виде проушины. К проушине с помощью бистросъемного пальца 5 крепится поворотная головка элеватора таким образом, чтобы обеспечивался зазор не более 2 мм.
В центральное отверстие корпуса помещаются и завариваются два полукольца 2 и имеющие пазы (в одном полукольце конусный паз) шириной несколько больше диаметра каната. В образовавшемся конусном пазу с помощью клина 4 может быстро закрепляться и отсоединяться талевый канат.
Элеватор (рис. 38) предназначен для проведения спуско-подъемных операций без участия верхового рабочего.
Элеватор состоит из корпуса 1 цилиндрической формы с фронтальной прорезью, запорного кольца 2, поворотной головки 3 и отражателя 4. В нижней части корпуса имеется конусное посадочное гнездо под бурт стержневого наголовника. При спуске бурового снаряда в скважину и при работах «на вынос» фронтальная прорезь корпуса перекрывается запорным кольцом. Поворот запорного кольца и перемещение его вдоль корпуса элеватора ограничиваются стопором 5. Отражатель служит для отвода элеватора от свечи и выполнен в виде наклонной плоскости, вваренной в среднюю часть корпуса. Свободное вращение поворотной головки обеспечивается упорным подшипником 6, который смазывается через масленку 7.

Поворотная головка собирается отдельно от элеватора. При этом обеспечивается свободное вращение головки относительно гайки 8 и стопорится винтом 9. После этого поворотная головка в сборе устанавливается в корпус элеватора с помощью ганки 8, которая фиксируется от самопроизвольного отвинчивания винтом 9.
В нижней части против фронтальной прорези в корпусе элеватора расточен паз В диаметром 65 мм под углом 30° к осп корпуса элеватора. Такой же паз Г выполнен на запорном кольце таким образом, что при закрытой фронтальной прорези расточка Г в запорном кольце является продолжением расточки В в корпусе. Эти расточки с одной стороны нужны как направляющие желоба для бурильной трубы, а с другой стороны — увеличивают угол наклона бурильной трубы относительно оси элеватора, что необходимо для надежной работы элеватора при проведении спуско-подъемных операций на скважинах с большим углом наклона.
Для проведения спуско-подъемных операций элеватор комплектуется наголовниками, отличающимися от наголовников комплекта МЗ-50-80-1 только размерами.
При подъеме бурильной колонны из скважины на верхний конец свечи надевается наголовник. Для этого необходимо взять наголовник за головку и вытянуть вверх стержень. В таком положении опорные выступы корпуса наголовника вводятся в проточки бурильного замка. Затем стержень опускается (вводится в резьбовую расточку муфты) и поворачивается, чем достигается надежная фиксация наголовника на муфте. Все операции по надеванию наголовника на муфту замка рабочий выполняет одной рукой за 1,0 1,5 с.
Под опорный бурт наголовника заводится элеватор с открытой фронтальной прорезью и колонна поднимается на длину свечи.
При установке нижнего конца отвинченной бурильной свечи на подсвечник фронтальная прорезь корпуса элеватора ориентируется в сторону свечеприемника, а сам элеватор опускается вниз. При этом отражатель, скользя по наголовнику, отсоединяет элеватор от верхнего конца свечи и отталкивает последнюю в сторону свечеприемника, продолжая свободно опускаться к устью скважины.
При спуске колонны бурильных труб в скважину элеватор надевается на свечу, отодвинутую от общего пакета труб, фиксируется на свече запорным кольцом и производится подъем элеватора по свече. При достижении конусом скобы конусной ловушки каретки дальнейшее движение вверх элеватора, скобы и каретки будет совмещено. После того как элеватор подхватит свечу за наголовник, а нижний конец бурильной свечи выведен на ось скважины, конус скобы войдет в конусную ловушку каретки и будет достигнута центровка верхнего конца бурильной свечи по оси скважины. После навинчивания и опускания очередной свечи в скважину колонны бурильных труб устанавливают на подкладную вилку, поворачивают запорное кольцо до упора и отсоединяют элеватор от наголовника. После этого с муфты снимают и наголовник. Для этого берутся за головку 3 и поворачивают стержень примерно на 180° с одновременным приподниманием стержня. Стержень извлекается из резьбовой расточки в муфте, и наголовник снимается с муфты замка. Эти операции рабочий выполняет одной рукой за 1,0—1,5 с.

Монтаж мачты после транспортировки ее с завода-изготовителя производится в следующей очередности. На месте монтажа буровой установки подготавливают сравнительно ровную площадку размером 10х15 м. На эту площадку устанавливают платформу (сани) вместе со станком и буровым домиком С помощью автокрана на буровой станок устанавливают основание и крепят пальцами к фланцу вращателя и к специальной опоре. Устанавливается подкос, с помощью которого выставляют основание и вращатель в вертикальное положение. Одновременно собирают ферму, к которой крепят кронблок с конечным выключателем и отвесом. Через центральное отверстие в отвесе пропускают направляющую и крепят ее к кронштейнам. После этого к ферме крепится свечеприемник со штропами.
В собранном виде ферма поднимается автокраном и ее проушины соединяются пальцами с кронштейнами основания, а гидроцилиндр подъема закрепляется к шарнирам основания мачты и фермы.
От лебедки бурового станка внутри фермы пропускают талевый канат до кронблочной рамы и далее, огибая ролик кронблока, пропускают под рамой свечеприемника к устью скважины. После этого включают гидроцилиндр подъема и поднимают ферму в вертикальное положение. Рекомендуется отключать подачу масла в гидроцилиндр в тот момент, когда расстояние между опорами фермы и основания будет равно примерно 50 мм. Поднятую ферму закрепляют к основанию с помощью откидных болтов, которые, стягивая конусные опоры, производят центрирование фермы относительно основания, а следовательно, и относительно вращателя станка и оси скважины. Свечеприемная дуга под действием силы тяжести занимает горизонтальное положение и удерживается канатами.
Свободный конец талевого каната пропускается через отверстие в конусной ловушке каретки, через центральное отверстие в скобе и огибает вокруг торцовой канавки клина. В таком виде канат вместе с клином вводится в конусный паз полуколец и надежно расклинивается в скобе.
Каретка с помощью лебедки станка поднимается, ролики каретки заводятся на направляющую трубу и последняя крепится к нижнему кронштейну.
Ослабляют крепление фланца к корпусу станка и с помощью винтового подкоса устанавливают мачту и вращатель под заданный угол бурения скважины. После этого фланец надежно крепится к корпусу станка. На этом заканчиваются монтаж и подготовка мачты и установки для бурения скважины.
Демонтаж мачты производится в обратной последовательности. При работе на одном участке и при переездах па небольшие расстояния демонтажные работы, в основном, сводятся к переводу мачты из наклонного в вертикальное положение и затем опусканию ее в транспортное (горизонтальное) положение. При транспортировке установки по сравнительно ровным участкам ферму можно не опускать в горизонтальное положение. Таким способом были осуществлены почти все перевозки буровой установки при проведении предварительных и приемочных испытаний в производственных условиях.
Номинальная грузоподъемность на крюке определяется статической нагрузкой от наибольшей массы бурильной колонны, используемой при алмазном бурении скважин на проектную глубину, максимальная грузоподъемность на крюке — нагрузкой, величина которой соответствует значению номинальной грузоподъемности, увеличенной на коэффициент, учитывающий силы сопротивления подъему бурильной колонны. Для установок класса УКВ-50/100 грузоподъемности должны быть:

В действительности нагрузка на кронблоке мачты зависит от грузоподъемности лебедки, талевой оснастки, перегрузочной способности приводного двигателя и т. д.
Поэтому грузоподъемность мачты (вышки) рассчитывается по. формулам:
для установок с неподвижным концом каната

для установок, у которых отсутствует неподвижный конец каната,

В общем случае, исходя из грузоподъемности лебедки бурового станка, кратковременная нагрузка на мачту определяется по формуле

где Qм — максимальная допустимая грузоподъемность мачты; Pст.л — максимальная статическая грузоподъемность лебедки бурового станка на минимальной скорости; n — число подвижных струн в талевой оснастке; n — к. п. д. талевой системы (n=0,98).
Рст.л принимается согласно паспорту на станок или находится по формуле

где Мmах — максимальный крутящий момент на барабане лебедки; rб — радиус барабана по-первому слою навивки каната (rб=0,0875 м).

где N — номинальная мощность электродвигателя (N = 8,3 кВт при n = 1450 об/мин); nб — частота вращения барабана лебедки (nб = 73 об/мин); К коэффициент перегрузки двигателя (привода) станка; для электродвигателя К = 1,7-2,2 (указывается в паспорте на электродвигатель), для двигателя внутреннего сгорания K = 1,1, n — коэффициент полезного действия, n = 0 89.
В процессе проведения спуско-подъемных операций на мачту действуют значительные динамические усилия.
Согласно исследованиям величина коэффициента динамичности имеет наибольшее значение при спуске колонны в момент торможения.
Однако в процессе эксплуатации буровой установки УКВ-50/100 нами было отмечено значительное увеличение усилий в канате при ликвидации прихватов.
Динамические усилия, действующие на мачту, зависят от большого числа факторов: высоты мачты, массы бурового снаряда, характера движения бурового снаряда при спуске, типа и мощности приводного двигателя, маховых моментов вращающихся масс трансмиссии бурового станка, тормоза буровой лебедки и др. Поэтому достоверное определение динамических усилий невозможно без экспериментальных исследований работы конкретной буровой установки.
С целью определения действующих на мачту МР-8 нагрузок, а также определения фактической несущей способности мачты нами в 1973—1974 гг. на полигоне СКВ ВПО «Союзгеотехника» были проведены экспериментальные работы, которые проводились по следующей методике:
1. Груз массой 630 кг поднимался лебедкой станка на высоту 5 м. Опускание груза производилось в режиме свободного падения. Торможение лебедки осуществлялось плавно и резко на участке пути 1,0—1,5 м от земли. Этим экспериментом производилась имитация спуска колонны бурильных труб в скважину на проектную глубину при плавном и резком ее торможении.
2. Мачту нагружали максимальным усилием, развиваемым лебедкой станка на первой скорости и на первом слое каната на барабане лебедки. Нагрузка на мачту осуществлялась при плавном и резком нагружении двигателя, доводя его до полной остановки. Этим экспериментом достигалась имитация работ по подъему колонны бурильных труб скважины и при ликвидации прихватов.
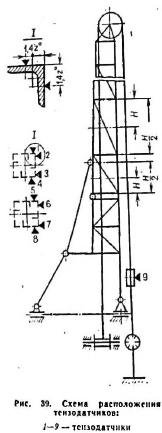
Для замеров напряжений, возникающих в элементах фермы, на стойки мачты были установлены 8 рабочих тензодатчиков типа 2ПКБ-20-200ГБ. Тензодатчики предварительно наклеивались на пластину, изготовленную из стальной ленты марки 1Х18Н9Т и толщиной 0,15 мм, затем приваривались к стойкам мачты с помощью специального аппарата точечной сварки. Датчики температурной компенсации также наклеивались на отдельные пластины и приваривались рядом с рабочими. Схема расположения тензодатчиков дана на рис. 39.
Для тарирования тензодатчиков использовался метод электрического шунта.
Кроме этого, при проведении исследований напряжении в элементах формы мачты, возникающих при ликвидации прихватов, между динамометром, закрепленном к фундаменту, и рабочим канатом помещался специальный тензоэлемент.
Тензоэлемент представляет собой стержень диаметром 23 мм с наклеенными на него пятью датчиками. Один датчик (компенсационный) предварительно наклеивался на специальную пластину. Четыре рабочих датчика использовались для того, чтобы компенсировать несимметричное нагружение тензоэлемента (например изгиб), и наклеивались на тензоэлемент по окружности через 90°.
Компенсационный тензодатчик предназначен для устранения влияния температуры на точность измерений.
Тарировка тензоэлемента производилась непосредственным нагружением (растяжением) его контрольными грузами 150 и 300 кг с записью контрольных «ступеней», затем определялся масштаб записи но формуле

где М — масштаб записи, кг/мм2; Р — нагрузка, кгс; А — амплитуда отклонения луча на фотобумаге, мм.
Тензоэлемент устанавливается в испытательную талевую оснастку мачты для дублирования показаний нагружения каната, определяемых динамометром, так как «пики» этих нагрузок кратковременны и не всегда удается их зафиксировать визуально по динамометру.
Запись показаний тензодатчиков выполнялась следующим образом. После прогрева аппаратуры в течение 20—30 мин производились необходимые регулировки. Затем калибровались и устанавливались «0» каналы тензоусилителей и проводилась тарировка каналов методом шунта для записи нагружений. Амплитуда «отскока» луча осциллографа соответствует для каждого канала 1000 кгс/см2. Скорость протяжки ленты 20 мм/с. Интервалы временных отметок — 0,2 с.
После каждого цикла измерений производилась проверка возвращения на «0» показаний приборов.
В результате проведенных исследований было установлено:
- при плавном торможении свободно падающего груза (путь торможения 1,0—1,8 м) усилия в канате возрастают на 25—50 % от фактической массы груза;
- при быстром торможении свободно падающего груза (путь торможения 0,3—0,6 м) усилия в канате возрастают на 320—350 % от фактической массы груза и достигают 2200 кгс; при плавном нагружении приводного двигателя (время, нагружения 2—4 с) до его остановки усилия в канате соответствуют расчетной максимально возможной грузоподъемности лебедки станка — 2240 кгс;
- при быстром нагружении приводного двигателя (время нагружения 0,2—0,3 с) до его полной остановки «опрокидывания» усилия в канате возрастают в 2,2—2,5 раза по сравнению с расчетной максимально возможной грузоподъемностью лебедки станка и достигают 5700 кгс (рис. 40).


Это объясняется наличием в кинематике станка больших маховых масс, которые ранее не учитывались при расчете грузоподъемности лебедки стайка.
К маховым массам бурового станка УКБ-50/100, значительно влияющим на кратковременное увеличение нагрузок на мачту, следует отнести шкив клиноременной передачи от электродвигателя к коробке передач и в особенности от фрикциона сцепления.
Результаты приведенных выше экспериментальных работ впоследствии были подтверждены результатами теоретических расчетов, проведенных Г.Д. Поляковым и В.С. Булгаковым, и поэтому были заложены в PTM 41,06—74, который рекомендует при расчете вышек и мачт кроме статических расчетов производить проверку прочности с учетом динамики, вызываемой инерцией вращающихся масс станка.
Максимальное усилие лебедки, действующее на канат при заклинивании бурового снаряда в скважине, складывается из статического и динамического усилий:

где Mmax — максимальный крутящий момент на барабане лебедки, соответствующий максимальной мощности двигателя с учетом его возможной перегрузки (Mmax = 193 кгс*м); rб — радиус барабана лебедки по первому слою навивки каната (rб = 0,875); w — угловая скорость ротора двигателя,

n — обороты в минуту приводного двигателя (n = 1450 об/мин); Ск — жесткость каната.

где I1 — момент инерции ротора двигателя (I1 = 0,713 кгс*см*с2); I2 — момент инерции ведущего шкива (I2 = 0,425 кгс*см*с2); I3 — момент инерции ведомого шкива с фрикционом (I3 = 4,79 кгс*см*с2); I4 — момент инерции барабана лебедки (I4 = 3 кгс*см*с2); i1 — передаточное отношение от вала двигателя до валя ведомого шкива с фрикционом (i1 = 1,2); i2 — передаточное отношение от вала двигателя до барабана лебедки (i2 = 19,8).
В связи с изложенным нам представляется необходимым ввести соответствующие изменения в технико-эксплуатационные требования СЭВ к буровым геологоразведочным установкам, ТЭТ 04—71. определяющим основные положения методики расчета установок для бурения геологоразведочных скважин на твердые полезные ископаемые.
Другие новости по теме:
Информационный некоммерческий ресурс fccland.ru ©
При цитировании информации ссылка на сайт обязательна.
Копирование материалов сайта ЗАПРЕЩЕНО!
При цитировании информации ссылка на сайт обязательна.
Копирование материалов сайта ЗАПРЕЩЕНО!