Системы автоматического управления процессом бурения
Автоматическое управление режимами бурения взрывных скважин можно отнести к одной из первых работ в данной области на станках БСШ-1. Система автоматического управления была разработана институтом Гипроуглеавтоматизация, в которой регулирование осевой нагрузки производится из условия стабилизации момента на валу двигателя вращателя на номинальном уровне, а регулирование частоты вращения инструмента — в функции механической скорости бурения. Она оказалась работоспособной при бурении в сравнительно однородных породах с коэффициентом крепости f* < 12. Обусловлено это тем, что в основу построения системы в конечном счете положен критерий стабилизации момента двигателя вращателя, не отвечающий ни одному из известных критериев, обеспечивающих оптимальное сочетание режимных параметров в условиях случайного изменения в широком диапазоне физико-механических свойств буримых пород. В связи с этим данная система распространения не получила. Тем не менее эти начинания сыграли положительную роль в развитии буровой автоматики.
Впоследствии Челябинским политехническим институтом и НИИОГР начаты работы в области автоматизации процесса бурения взрывных скважин. В результате совместно с НИИОГР была предложена система, в основу построения которой был положен критерий минимума стоимости бурения 1 м проходки реализованной априорными программными зависимостями, определяющими оптимальные значения режимных параметров.
Система программного регулирования осевой нагрузки при неизменной частоте вращения бурового инструмента применительно к условиям подземных разработок предложена Г.И. Paxлеевым. Описанная система также относится к программным, так как оценка свойств породы в ней производится по моменту на штанге.
В системах, предложенных в более поздних работах, выбор оптимальных значений режимных параметров осуществляется с помощью функциональных преобразователей, которые построены на основе предварительных технологических исследований.
Некоторые авторы приводят АСУ, в основе которой использован критерий максимальной механической скорости бурения. Система включает в себя автономные CAP режимных параметров P и n, управляемые двухканальным экстремальным регулятором. Предложены к использованию различные технико-экономические показатели процесса шарошечного бурения, позволяющие построить САУ.
Приведенный выше обзор практически охватывает все известные работы по автоматизации процесса шарошечного бурения.
Далее продолжен обзор систем автоматического управления в области глубокого бурения, наиболее близкого к бурению разведочных скважин.
На начальном этапе развития функции буровых автоматов в основном сводились к поддержанию заданной осевой нагрузки или скорости подачи.
С развитием турбинного бурения, имеющего максимум скорости бурения, из-за мягкости характеристики турбобура было предложено несколько экстремальных регуляторов, например АТБ-1 и AHC-1 Гипронефтемаша и автомат ЛПИ. Регулируя величину осевой нагрузки, эти устройства находят максимум механической скорости бурения и поддерживают се.
В стадии разработки или освоения находятся устройства, регулирующие входные параметры с целью ведения процесса бурения по критериям максимума рейсовой скорости или минимума стоимости бурения.
За рубежом вопросами автоматизации непосредственно процесса глубокого бурения начали интенсивно заниматься с 60-х годов. В основном системы автоматизации построены с привлечением ЭВМ. При этом наметились два направления в использовании вычислительной техники: либо ЭВМ устанавливается непосредственно на буровой (автономные системы) либо с помощью систем передачи информация с буровых подается в вычислительным центр фирмы.
К автономной системе следует отнести систему «Дрилсерв» Принцип ее работы заключается в следующем. На основе полученных данных о частоте вращения n долота и осевой нагрузке Р с соответствующих датчиков ЭВМ находит их произведение Pn и сравнивает полученное значение с величиной Р0n0, задаваемой программой, введенной в машину до начала бурения, и в дальнейшем, если Рn=/=Р0n0, производит корректировку режимных параметров. Применение «Дрилсерв» позволило добиться значительного снижения стоимости бурения.
Система, разработанная фирмой «Мартин Декер», полностью исключает предварительную обработку информации, поступающей с буровой, и почти моментально выдает данные, необходимые для повышения производительности бурения. Это позволяет изменять режимные параметры в соответствии с изменением условий в скважине исходя из условия минимизации стоимости бурения.
Вычислительное устройство, разработанное фирмой «Хайбл Онл Энд рифайнинг», предназначено для регулирования нагрузки на долото и частоты вращения непосредственно на буровой. В основу его построения также положен критерий минимума стоимости бурения.
С 1968 г. в бурении начался новый этап — переход к полной автоматизации этого процесса.
Если автоматизацией глубокого бурения исследователи занимаются уже более полувека, то решению аналогичной задачи разведочного бурения на твердые полезные ископаемые уделяется внимание в основном только в последние 12—15 лет. Несмотря на короткий срок, достигнуты определенные успехи в области автоматизации буровых станков разведочного бурения и оснащения их современной контрольно-измерительной техникой.
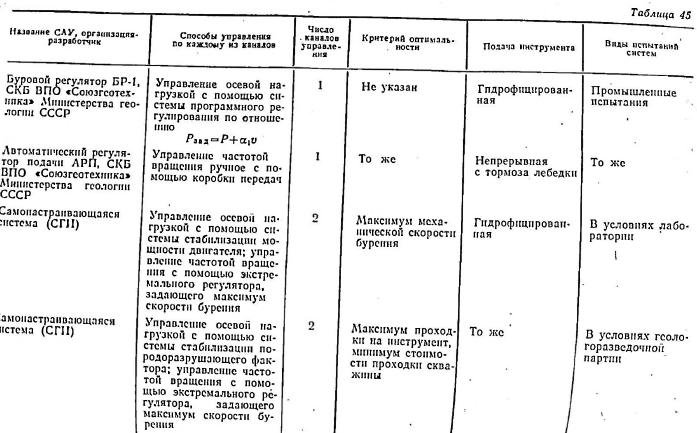

Ниже продолжен обзор только тех систем автоматического управления (известных нам), которые разработаны в основном для разведочного бурения (табл. 45). Из всего многообразия систем можно выделить пять типов, имеющих блочные схемы. На рис. 83 дана блок-схема систем автоматического управления. Кратко остановимся на особенностях этих систем, их достоинствах и недостатках. Приведенные системы различаются между собой по используемым информационным выходным параметрам объекта управления ОУ, числу каналов регулирования, применяемому критерию оптимальности, способу подачи бурового инструмента и ряду других факторов.
1. Буровой регулятор БР-1 (рис. 83,I) и автоматический регулятор подачи АРП. Каждое из этих устройств представляет собой одноканальную систему программного регулирования СПР IP осевой нагрузкой и обеспечивает постоянное сочетание двух параметров бурения:

где Рзад — заданное значение нагрузки; с — коэффициент пропорциональности; v — скорость бурения.
Регулятор БР-1 предназначен для гидрофицированной подачи бурового снаряда, АРП — для подачи инструмента с тормоза лебедки.
Достоинства: БР-1 один из первых разработанных в нашей ране регуляторов; регуляторы БР-1 и АРП обеспечивают поддержание осевой нагрузки с учетом измерения буримости пород; сравнительно просты как в схемном, так и в конструктивном отношении; использование подачи с тормоза лебедки (АРП); доведены до промышленного выпуска.
Недостатки: нет четких обоснований выбора значений Pзад и с, тем более автоматической их установки в системе нет обоснования критерия оптимальности; отсутствует второй канал управления частотой вращения породоразрушающего инструмента в функции физико-механических свойств разбуриваемой породы
2. Самонастраивающаяся система СГИ (рис. 83 II) состоит из подсистемы стабилизации мощности N двигателя (системы автоматического регулирования CAPN) и подсистемы экстремального регулирования частоты вращения (экстремальный регулятор ЭР). Система может обеспечивать (судя по источнику) получение максимальной механической скорости бурения, максимальной проходки на инструмент (соответственно минимального значения интенсивности износа инструмента Kи) или минимальной стоимости бурения 1 м скважины.
Достоинства: достаточно четко представлены критерии оптимальности для твердосплавного затупляющегося инструмента; управление ведется по двум параметрам P и n; возможна перенастройка системы в зависимости от выбранного критерия оптимальности.
Недостатки: мощность двигателя изменяется незначительно при широком варьировании осевой нагрузки уже при сравнительно небольших глубинах (200—300 м), поэтому на фоне больших помех эти малые изменения мощности весьма трудно использовать для управления осевой нагрузкой; мощность вращателя с глубиной скважины значительно возрастает, что требует постоянной корректировки задания Nзад; в основу работы канала управления частотой вращения заложена экстремальная зависимость v=v(n), что редко наблюдается на практике (в основном только при ударно-вращательном бурении). Известно также, что частота вращения в практике геологоразведочного бурения ограничена из-за недостаточной мощности привода вращателя (каждый тип станка имеет привод определенной мощности, превышение которой, исходя из прочностных условий, не допускается), появления вибрации выше определенной частоты вращения n и т. д. Поскольку в данной системе основным управляемым параметром с помощью экстремальной системы является n, a P — зависимым, корректирующим параметром, то в силу указанных ограничений по п система практически не выйдет в область оптимальных режимов.
Исходя из перечисленных недостатков можно сделать вывод, что систему такого типа вряд ли можно использовать для разведочного бурения даже небольших глубин (до 200 300 м).

3. Самонастраивающаяся система СГИ состоит из двух подсистем (рис. 83,III): стабилизации породоразрушающего фактора и экстремального регулирования шагового действия. Первая подсистема осуществляет стабилизацию заданного значения породоразрушающего фактора Ф=Pn=const за счет введения функционального преобразователя ФП. Вторая подсистема обеспечивает (совместно с первой) поиск и поддержание частоты вращения на таком уровне, когда скорость бурения достигает максимального значения. Эта система существенно отличается от первой за счет введения функциональной связи, которая, вообще говоря, по принципу построения практически не отличается от предложенных ранее систем.
Достоинства те же, что и у системы, показанной на рис. 83,II; использован регулируемый привод вращателя по системе асинхронный вентильный каскад; введена связь между двумя каналами.
Недостатки: в системе пет автоматического задания значения породоразрушающего фактора при изменении условий бурения; предполагается, что зависимость v=v(n) строго экстремальна; нет четкого обоснования выбора системой значения nopt, соответствующего экстремуму зависимости v=v(n). В данной системе, как и в первом варианте, несмотря на наличие функциональной связи между P и n, основным каналом управления является канал по n. В силу тех же причин, указанных относительно первого варианта этой системы, эффективность ее при оптимизации вращательного колонкового бурения сомнительна.
4. Система управления ЧПИ—НИИОГР (рис. 83,IV), предназначенная для бурения взрывных скважин, может найти применение для ограниченных условий в геологоразведочном бурении благодаря простоте в реализации.
В основу построения данной системы, как уже отмечалось, положен критерий минимума себестоимости бурения единицы длины скважины. Канал регулирования осевой нагрузки СПР подобен буровому регулятору БР-1, только зависимость осевой нагрузки P от скорости бурения выбирается нелинейной, удовлетворяющей минимуму себестоимости. Капал управления частотой вращения также программного типа. В зависимости от установившегося значения осевой нагрузки Pу (или установившейся скорости бурения vy) по заданной программе, определяемой функциональным преобразователем ФП, устанавливается оптимальное значение частоты вращения бурового инструмента. В данной системе обеспечивается инвариантность экстремального значения критерия оптимальности относительно вариаций свойств пород.
Достоинства: сравнительная простота технической реализации; отсутствие измерителя скорости бурения при использовании установившегося значения осевой нагрузки Py.
Недостатки: отсутствует автоматическая настройка внешней характеристики гидрофицированной системы подачи в зависимости от конкретных горно-геологических условий и неприемлема система при бурении со свободной подачей, т. е. с тормоза лебедки.
5. Система управления СМИ (Сибирский металлургический институт им С. Орджоникидзе, г. Новокузнецк) и СГИ — НИИОГР (рис. 83, V).
Построение системы основано на поиске искусственных экстремумов механической скорости бурения, совпадающих со качениями режимных параметров, обеспечивающих минимум стоимости 1 м бурения скважины. Для поиска двумерного экстремума предложен комбинированный метод, предусматривающий вначале спуск в заданном направлении, а затем поочередное изменение координат (методом Гаусса—Зайделя). Комбинированный метод весьма сложен и требует сложной схемы. В.Г. Чижевским рассмотрена аналогичная система управления с двумя экстремальными подсистемами с синхронным детектированием, осуществляющая поиск по методу градиента и имеющая частотные разделения каналов.
Однако данная система может быть реализована лишь при наличии информационно-измерительных устройств повышенной помехоустойчивости.
Таким образом, приведенный обзор, характеризующий, состояние проблемы АСУ процессом бурения, подтверждает, что в настоящее время нет устройств, позволяющих оптимизировать процесс ударно-вращательного и механического колонкового бурения. Сложившееся на сегодня такое положение, вероятно» объясняется сложностью проблемы и прежде всего отсутствием научно обоснованных критериев управления. На основе материалов, посвященных критериям управления и взаимосвязи режимных параметров, приведены принципы построения систем управления процессом ударно-вращательного и механического колонкового бурения, изображенные на рис. 83 под номерами VI, VII и VIII.
Другие новости по теме:
Информационный некоммерческий ресурс fccland.ru ©
При цитировании информации ссылка на сайт обязательна.
Копирование материалов сайта ЗАПРЕЩЕНО!
При цитировании информации ссылка на сайт обязательна.
Копирование материалов сайта ЗАПРЕЩЕНО!