Оптимизация пространственных конструкций
При проектировании сооружений с пространственными конструкциями на одном из первых этапов требуется определить рациональный тип конструкции, ее оптимальную форму и размеры. Эти задачи тесно связаны с проблемой снижения материалоемкости, сокращения трудозатрат, сроков возведения, стоимости строительства и эксплуатации. Задачи оптимизации решаются для типов пространственных конструкций с разработанными статическими расчетами на прочность и жесткость.
В процессе оптимизации по результатам многовариантных расчетов аппроксимируют некоторыми выражениями целевые функции. Требования, предъявляемые к конструкции, удовлетворяются в процессе работы под нагрузкой. Для оптимального проектирования используются только определенные наборы значений переменных параметров и соответствующие им значения целевых функций. Это методологическое положение позволяет без усложнений вычислительных процедур оптимизации использовать расчеты, наиболее полно отражающие особенности работы оптимизируемых конструкций.
Наиболее эффективен для построения оптимизационного процесса системный подход. В этом случае в качестве объекта исследования выбирается та или иная совокупность пространственных конструкций, например, система их типов, в которой при варьировании генеральных геометрических параметров образуются различные конструктивные формы оболочек, висячих покрытий, складок. Эти типы конструкций отличаются один от другого не только геометрическими размерами, но и качественной принадлежностью к различным типам конструкций.
Как один из первых этапов построения оптимизационного процесса рекомендуется использовать излагаемую ниже методику рационального проектирования оболочек произвольной формы. В этой методике применяется системный подход и аппарат метода конечных элементов. В качестве исходных критериев выдвигаются следующие: минимизация деформативности оболочек, изгибающих моментов краевых эффектов в зонах сопряжения составляющих оболочек, главных растягивающих усилий в опорных зонах и нормальных усилий в контурных элементах. Совокупность этих факторов предложена на основе обширных экспериментально-теоретических исследований и опыта проектирования.
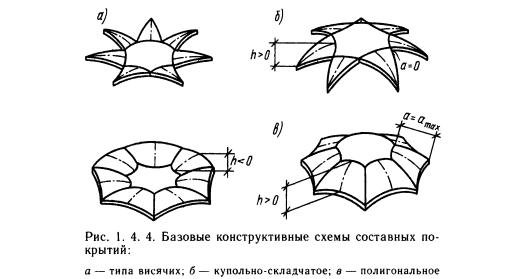
В основу подсистемы конструкций с осесимметричным циклическим планом положены четыре базовые конструкции (рис. 1.4.4), детально исследованные. Результаты этих исследований показали, в частности, закономерность разделения базовых, а следовательно, и остальных элементов системы на два класса — составные оболочки типа куполов и типа висячих. Из всей совокупности геометрических параметров в качестве генеральных управляемых были приняты параметры а и h (соответственно длина сопрягаемого края оболочек и расчетная высота). На рис. 1.4.5 показано полученное поле экстремумов изгибающих моментов в зоне сопряжения оболочек произвольной конструктивной схемы в рамках упомянутой подсистемы.
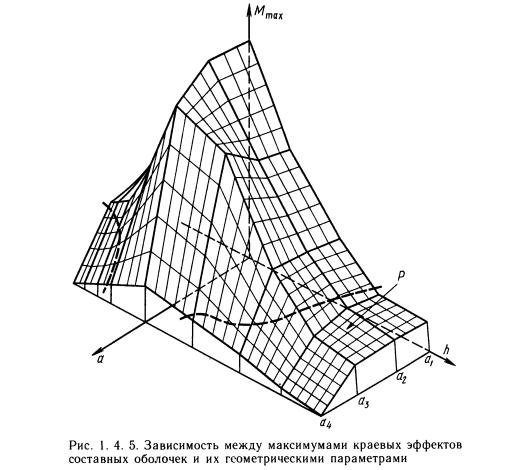
Следует обратить внимание на интенсивное падение изгибающих моментов краевого эффекта Mк для конструктивных схем на сравнительно малом интервале изменения параметров а и h (за пределами выделенной пунктиром части поля P на рис. 1.4.5). При этом полигональные оболочки с большим а (см. рис. 1.4.4, в) более предпочтительны, чем купольно-складчатые оболочки с а = 0 (см. рис. 1.4.4,б), так как часть поверхности поля с малыми Мк, соответствующая конструктивным схемам последнего типа, несущественна.
Рассмотрим, например, вопрос о возможности локализации или даже устранения краевых эффектов, используя системный подход и методику рационального проектирования.
Исследуем закономерности напряженно-деформированного состояния конструктивных схем (рис. 1.4.5) при изменении параметров а и h с использованием метода конечных элементов. Изучение этой функции показывает, что она в определенной области имеет экстремальный характер, а за ее пределами значения краевых изгибающих моментов могут быть несущественны. Можно сформулировать условие выбора конструктивных схем исходя из условия Mк < М'к. Под M'к при этом понимаются некоторые величины изгибающих моментов, которые могут быть восприняты арматурой ребер плит или монолитной набетонки. Такая оболочка может быть признана рациональной конструкцией, удовлетворяющей требованиям минимальных краевых эффектов, воспринимаемых без заметных дополнительных затрат.
Несимметричный характер поля краевых моментов указывает на то, что составные оболочки типа висячих в ряде случаев могут быть более рациональными конструкциями, чем куполообразные. Следует отдавать предпочтение оболочкам с большим как куполообразным, так и висячим подъемом, но при этом они должны иметь значительный «запас» кривизны. Это следует из того, что значения производных в точках участка поверхности P малы и углы наклона касательных могут быть несущественны (рис. 1.4.5).
Аналогичным путем может быть построено поле главных растягивающих усилий и произведен выбор некоторых конструктивных схем, удовлетворяющих требованиям Rmain < M'main, а также поле вертикальных перемещений W Указанные критерии рациональности являются частными, но их совокупность, как показано выше, позволяет уже на первом этапе осуществлять выбор рациональных типов и их параметров.
Целевая функция задачи строится исходя не из частных показателей конструкции, а из рассмотрения всей совокупности расходов, которые проявляются на стадии проектирования, изготовления, транспортировки, монтажа и эксплуатации сооружения. Как показано, критерием оптимальности конструкции являются приведенные затраты. Именно эту целевую функцию следует построить и анализировать исходя из соблюдения условий прочности и деформативности пространственных конструкций.
Рассмотрим однопараметрические задачи оптимального проектирования составных оболочек, каждая из которых представляет практический интерес. В качестве варьируемых управляемых параметров исследуются: высота конструкции h и параметр а при фиксированных значениях одного из них. Прочие геометрические параметры, характеризующие конструкцию, входящие в системы, приняты неуправляемыми, т. е. постоянными. К ним относятся: радиус кривизны верхней составляющей сферической оболочки R = 54 м, радиусы кривизны боковых составляющих сферических оболочек R1 = 60 м, радиус окружности основания верхней сферической оболочки r1 = 21 м, радиус основания нижней описанной окружности r2 = 58 м, толщина полки плит верхней и боковых составляющих оболочек b = 35 мм при высоте ребер этих плит hr = 300 мм. Эти параметры приняты в соответствии с каталожными размерами унифицированных плит (см. ниже табл. 2.6.1 и 2.6.2).
Конструктивно рассматриваемый класс составных оболочек (см. рис. 1.4.4) выполнен следующим образом: верхняя и боковая составляющие оболочки описаны по сферической поверхности и собираются из унифицированных цилиндрических плит 3x6 м. На линии сопряжения верхней и боковых составляющих оболочек находится внутреннее опорное кольцо, на линии сопряжения боковых составляющих оболочек между собой — радиальные арки, а боковые оболочки окаймлены контурными арками. Описанные конструкции имеют шарнирно-неподвижные опоры по числу боковых оболочек. При h < 0 оболочки системы имеют еще центральное кольцо с расходящимися жесткими вантами.
Для построения целевой функции, связывающей изменение напряженно-деформированного состояния составных оболочек с изменением управляемых параметров, были проведены многовариантные статические расчеты составных оболочек при фиксированных значениях этих параметров. Расчеты проводились на равномерно распределенную нагрузку q = 500 Па методом конечных элементов в постановке метода перемещения по программе «ПЛАНК». Рассмотрены циклически симметричные формы, поэтому расчетные схемы включают в себя повторяющуюся циклическую часть составной оболочки. На границах симметрии ставятся однородные граничные условия в отношении соответствующих перемещений и углов поворота.
В результате расчета исследуемых составных оболочек методом конечных элементов при фиксированных значениях параметров а и h были получены значения перемещений, а также нормальных усилий и моментов во всех интересующих нас конструктивных элементах. В соответствии с условиями прочности, сформулированными в СНиПе в зависимости от вида напряженного состояния, найден необходимый для удовлетворения условий прочности расход материалов: металла (на основные несущие элементы, армирование в виде сеток и каркасов сборных элементов и монолитных швов), сборного и монолитного бетона, монолитных угловых зон и зон сопряжения составляющих оболочек.
Расход материалов как функция управляемых параметров является исходным материалом для построения целевой функции задачи, в качестве которой приняты приведенные затраты П:

где Скд — себестоимость производства конструкций и строительно-монтажных работ в деле; Eн — нормативный коэффициент эффективности капитальных вложений; Tн — ратчетный период, в течение которого учитываются эксплуатационные затраты (или нормативный срок окупаемости капитальных вложений); К — капитальные вложения в базу, приведенные к году окончания строительных работ; Сэ — среднегодовые эксплуатационные расходы, связанные с текущим содержанием здания; Cк — стоимость капитального ремонта.
Расчетная себестоимость конструкций Скя выражается как

где Скд(сб) — расчетная себестоимость сборных железобетонных плит в деле; Скд(мон) — расчетная себестоимость работ по устройству монолитных зон и швов; Скд(мет) — расчетная себестоимость стальных конструкций.
Расчетная себестоимость сборных железобетонных плит определяется по формуле

где Cк — полная расчетная стоимость конструкций, включающая себестоимость бетонной смеси, ее формования, затраты на содержание форм, себестоимость на тепловую обработку изделий, себестоимость изготовления арматуры, каркасов, сеток и закладных деталей, стоимость всех видов стали, себестоимость укладки арматуры и закладных деталей в форму, а также себестоимость операций по повышению заводской готовности; Cт — себестоимость транспортировки конструкций от завода-изготовителя до строительной площадки; 1,02 — коэффициент, учитывающий заготовительно-складские расходы; См — себестоимость монтажа конструкций (укрупненных секций и укрупнительной сборки); Kз — коэффициент зимних удорожаний; ДН — изменяющаяся часть накладных расходов.
Расчетная себестоимость работ по устройству монолитных зон и швов определяются по формуле

где Kн — коэффициент, учитывающий накладные расходы; Vм.з — объем бетона монолитных зон; Цм.з — себестоимость заводского изготовления 1 м3 бетонной смеси (включая стоимость материалов); nб — коэффициент, учитывающий потери бетона при формовании; Цм.т — затраты на перевозку 1 м3 бетонной смеси и бетонирование; Vм.ш — объем бетона монолитных швов; Цм.ш — себестоимость заводского изготовления, перевозки и бетонирования 1 м3 бетонной смеси; Gм.з — расход арматуры в монолитных угловых зонах и зонах сопряжения оболочек; Цз.а — стоимость заводского изготовления 1 т арматурных каркасов; Цт.а — затраты на транспортировку и укладку 1 т арматурных каркасов и сеток.
Расчетная себестоимость металлических конструкций в деле определяется по выражению

где Kн — коэффицинт, учитывающий накладные расходы; Kз — коэффициент зимних удорожаний; Kз.с — коэффициент, учитывающий заготовительно-складские расходы строительства; С — себестоимость изготовления стальных конструкций, включая стоимость металла; Cт — себестоимость транспортировки конструкций; Cм — себестоимость монтажа металлоконструкций; Сокр — себестоимость огрунтовки и окраски металлоконструкций.
Капитальные вложения в основные фонды строительных организаций предприятий строительных конструкций и в производство строительных материалов

где Кi — удельные капитальные вложения в материально-техническую базу в рублях на единицу измерения; Vi — объемы в соответствующих единицах измерения объемов капитальных вложений.
Среднегодовые эксплуатационные расходы

где Сам — годовые амортизационные отчисления; Cт.р — годовой объем текущих ремонтов; Cст — годовые расходы на эксплуатацию внутренних санитарно-технических систем, включая отопление здания, его вентиляцию, водоснабжение и канализацию; Cсн — годовые расходы на уборку снега с кровли; Сэл — то же, на электроосвещение.
Определив критерий оптимальности [формула (1.4.36)], выведенный из условий прочности рассматриваемых составных оболочек, сформулируем ограничения, накладываемые на параметры задачи деформативностью конструкций. Зададим интервалы изменения варьируемых параметров в следующих пределах:

Ограничим максимальный прогиб конструкции величиной:
W меньше Wmax = 1/ (500L) — для покрытий типа куполов (h больше 0, 0 м);
W меньше Wmax = 1/(250L) — для покрытий типа висячих (h меньше 0, 0 м).
Исходя из условий прочности СНиПа, соответствующих видам напряженного состояния элемента конструкции, можем определить необходимый расход материала Gi. Величина этого расхода будет функцией усилий M и N в том или ином конструктивном элементе. Для определения этих усилий при фиксированных значениях управляемых параметров проводим статический расчет анализируемых составных оболочек методом конечных элементов. Допустим, что мы фиксируем значения управляемых параметров: а = 0,0; 7,482: 14,964; 38,944 м; h = -7,0; -5,5; -3,92; 0,0; 5,5; 2,0; 11,0; 15,75 м.
В этом случае получаемые по статическому расчету усилия оказываются функциями управляемых параметров а и h:

В результате статических расчетов находим и значения прогибов в любой точке конструкции, которые выступают в роли условий-ограничений и также являются функциями управляемых параметров.
Итак, имеются целевая функция (1.4.36), а также целевые функции (1.4.37)...(1.4.42), носящие более частный характер, и функции-ограничения, заданные численно в результате статического расчета составных оболочек при фиксированных значениях варьируемых параметров. Для решения поставленной условно-экстремальной задачи построим аналитические зависимости, аппроксимирующие функции, полученные численным методом. Для этого воспользуемся кубическими сплайн-функциями, интерполирующими заданные точки (1.4.40). Представим кубическую сплайн-функцию следующим образом:

xi мешьне x меньше xi+1 на каждом подинтервале [xi, xi+1], i = 1, 2, ..., n-1, где [х1,у1), (x2,y22), ..., (xn,уn) — заданные дискретные узлы;

Коэффициенты bi определяются в результате решения системы линейных алгебраических уравнений вида

Сплайн (1.4.43) с коэффициентами, удовлетворяющими системе уравнений (1.4.44), обеспечивает непрерывность кубических полиномов соседних интервалов, а также их первых и вторых производных.
Аналитическая аппроксимация целевых функций дает возможность определить минимум однопараметрических функций методами классической математики. Накладывая при этом ограничения на деформативность конструкции, мы решаем условно-экстремальную задачу нахождения оптимальных значений целевых функций и управляемых параметров исходя из условий прочности и деформативности сооружения. Решение этой задачи на основе изложенного алгоритма отражено в программе, написанной на языке ФОРТРАН-1 V, и реализовано на ЭВМ ЕС-1033.
В результате решения поставленных задач получены оптимальные значения параметров задачи для функций (1.4.36)...(1.4.41).
Анализ результатов решения поставленных задач отыскания минимума приведенных затрат, расчетной себестоимости конструкций в деле и годовых эксплуатационных расходов исходя из условий прочности и деформативности рассматриваемого класса составных оболочек показал следующее.
1. Приведенные затраты как функция параметра а в зависимости от фиксированного значения параметра h приобретают минимальное значение в основном исходя из решения условно-экстремальной задачи. Следует отметить, что в этом случае приведенные затраты имеют минимальное значение при величине параметра а, практически совпадающей с минимумом значений полной расчетной себестоимости конструкций в деле и эксплуатационных затрат. Наименьшее из минимальных значений приведенных затрат отмечается при величине параметра h=11 м для оболочек типа куполов и h = 5,5 м для оболочки типа висячих. При этом купольные оболочки (h больше 0) по приведенным затратам оказываются лишь на 5 % эффективнее составных висячих оболочек (h меньше 0).
2. Приведенные затраты как функция параметра h в зависимости от фиксированных значений параметра а приобретают минимальное значение как исходя лишь из условий прочности (а = 14,964 и 38,944 м), так и из решения условно-экстремальной задачи, т. е. с коррекцией в соответствии с условиями деформативности (а = 0,0 и 7,482 м) для оболочек типа куполов. Для висячих оболочек (h меньше 0) условия деформативности предопределяют минимум приведенных затрат лишь при а=0,0 м.
Для купольных оболочек оптимальное значение параметра h, при котором приведенные затраты достигают минимального значения, весьма существенно отличаются от оптимума Л, взятого из определения минимума расчетной себестоимости конструкций. При значениях параметра а = 0,0; 7,482; 14,964 и 38,944 м минимум расчетной себестоимости конструкций h = 15,75 м, т. е. наибольший из всех рассматриваемых. Учет влияния эксплуатационных расходов изменяет величину оптимального значения с 15,75 м до 14,18; 14,56; 13,33 и 8,23 м при перечисленных выше соответствующих значениях параметра а.
Для покрытий типа висячих это различие менее существенно. При значениях параметра а = 7,482; 14,964 и 38,944 м оптимальной является конструкция с наибольшей из рассматриваемых значений высотой h = 7,0 м. Этот же оптимум предопределяет также минимум расчетной себестоимости конструкций. При значении а = 0,0 м оптимальная конструкция исходя из минимума приведенных затрат имеет высоту h = 4,93 м, а исходя из минимума полной расчетной себестоимости конструкции h = 5,29 м. Составные висячие оболочки при малых значениях параметра а могут оказаться более эффективными, чем купольные.
Таким образом для рассмотренных случаев оптимальное решение составных оболочек типа купольных покрытий в зависимости от фиксированной высоты подъема находится в диапазоне аопт = 20,2...38,33 м. С увеличением пологости значение параметра аопт увеличивается. Оптимальное решение составных оболочек типа висячих покрытий вне зависимости от параметра h определяется как аопт = 0,0 м.
Покажем также решение двухпараметрической задачи оптимизации. Выше рассматривалась задача однопараметрической оптимизации составных конструкций и были выявлены оптимальные значения варьируемых параметров (имеются в виду высота сооружения h и параметр а, характеризующие форму составных оболочек) при фиксированном значении одного из них. Принимаются также такие же значения неуправляемых параметров, какие принимались выше при решении однопараметрической задачи, и такие же конструктивные решения этих классов конструкций. На первом этапе также рассматривают существенные, но частные критерии оптимизации (построение полей прогибов, максимумов моментов краевых эффектов в зонах сопряжения оболочек, главных растягивающих усилий в опорных зонах). В процессе рассмотрения совокупности этих критериев на основе экспериментов и опыта проектирования определяются рациональные значения генеральных геометрических параметров h и а, затем компонуют конструктивные формы составных оболочек. После этого строят и исследуют целевую функцию в виде приведенных затрат П (х) в соответствии с выражением (1.4.36).
Процесс оптимизации сводится к тому, что в n-мерном пространстве проектирования ищем допустимую точку х*, в которой П(х) достигает оптимального значения, т. е. П(х*) = орtП(х), где {х} — вектор управляемых параметров, в качестве которых приняты геометрические параметры а и h:

D = f(x); D = {x:g(х) меньше 0} — область допустимых решений.
В качестве функций ограничений приняты функции прогибов W, т. е. g(x) = Wmax - W(a,h); {, i = 1,2,..., п} — область поиска, Ai и Bi — наименьшее и наибольшее возможные значения i-го управляемого параметра xi.
Анализ исследуемого класса конструкций показал, что область поиска находится в пределах

Максимальный прогиб конструкции ограничен величинами:
W меньше Wmax = 1/(500L) — для покрытий типа куполов;
W больше Wmax = 1/(250L) — для покрытий типа висячих.
Полученные значения целевой функции и условий-ограничений оказываются численно заданными. Для возможности анализа этих функций, также как и при решении однопараметрической задачи (см. выше), аппроксимируем кубическими сплайн-функциями в виде

где xi меньше х меньше xi+1 на каждом интервале [xi, xi+1], i=l, 2, ..., п; (x1,y1), (x2,y2), ..., (xn,yn) — заданные дискретные узлы;

wi — корни системы уравнений, коэффициенты которой вычисляются из условий непрерывности кубических полиномов соседних интервалов, а также их первых и вторых производных.
Для решения поставленной условно-экстремальной задачи в случае однопараметрической задачи ранее мы применили классический способ отыскания минимума функций, исследуя поведение ее производной. В результате были получены оптимальные значения варьируемых параметров. В случае двухпараметрической (оптимизационной) задачи необходимо для ее решения пользоваться аппаратом нелинейного программирования, например, программным комплексом «DIAMIN». Он представляет собой диалоговую систему оптимизации, предназначенную для решения задач нелинейного программирования.
Он предназначен для решения в режиме диалога следующей задачи нелинейного программирования:
Решение задач с ограничениями проводится методом штрафных функций.
Для решения задач оптимизации можно пользоваться любым из 14 включенных в этот программный комплекс методов безусловной оптимизации.
К ним относятся: 1) методы нулевого порядка — Розенброка, Нелдера—Мида, Бокса, Пауэлла, тяжелого шарика со статически рассчитываемым градиентом, скорейшего спуска со статически рассчитываемым градиентом; 2) методы первого порядка — скорейшего спуска, Флетчера—Ривса, Полака—Рибьера, Ньютона—Рафсона, Давидона—Флетчера—Пауэлла, Бройдена—Флетчера—Годфарба— Жанно; 3) метод второго порядка — метод Ньютона.
Однопараметрические задачи также могут решаться с помощью указанных программ при варьировании параметра а и h. При этом исследуются числовые значения целевых функций, в качестве которых приняты приведенные затраты П, а также более частные функции — стоимость конструкций Скд, стоимость сборного железобетона Скд(об), монолитного железобетона Скд(мон), металла Скд(мет) и эксплуатационные расходы С при фиксированных значениях параметров а и h. Результаты решения однопараметрических задач с помощью аппарата нелинейного программирования, заложенного в комплексе «DIAMIN», практически совпадают с точным аналитическим решением, полученным для этих задач (см. выше).
Анализ результатов решения двухпараметрических задач оптимизации позволил сделать следующие выводы.
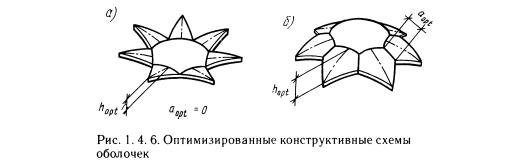
1. Оптимум для покрытий типа висячих оболочек соответствует конструкциям с а = 0 при некоторых значениях h (рис. 1.4.6, а) Анализ показал, что такие конструкции, как правило, требуют минимального расхода металла на контурные элементы.
2. Оптимум в оболочках типа куполов лежит в конструкциях со «сшиванием» боковых оболочек только на части своей длины (рис. 1.4.6,б). При этом из всей области следует отобрать такие значения параметра а, при которых гарантируется отсутствие пиковых значений напряженного состояния.
3. Полученные результаты оптимизации параметров соответствовали конструктивным решениям ряда построенных сооружений, а в некоторых случаях определили их (например, крытые рынки — Даниловский и Киевский в Москве, а также в г. Старом Осколе). Эти решения эквивалентны элементам системы модификации составных оболочек как «промежуточные» конструктивные формы, полученные на основе базовых конструкций (см. рис. 1.4.4).
4. Следует учитывать влияние частных критериев оптимальности, особенно расхода металла. Анализ показал, что в ряде случаев может быть достигнут оптимум даже за счет несущественного изменения параметра, например h. При этом приведенные затраты значительно сокращаются за счет влияния эксплуатационных расходов.
5. Совместное рассмотрение результатов работы составных оболочек типа куполов и висячих покрытий показывает, что при определенных в приведенном примере значениях геометрических параметров оболочки типа висячих оказываются предпочтительнее оболочек куполообразной формы, если за критерий оптимальности принимаются приведенные затраты. Однако это положение технически возможно только при заданных в исследовании пределах функций-ограничений.
Другие новости по теме:
Информационный некоммерческий ресурс fccland.ru ©
При цитировании информации ссылка на сайт обязательна.
Копирование материалов сайта ЗАПРЕЩЕНО!
При цитировании информации ссылка на сайт обязательна.
Копирование материалов сайта ЗАПРЕЩЕНО!