Приближенный расчет вантовых конструкций
Геометрия отдельной ванты. Основным элементом вантовых систем является гибкая (в отдельных случаях «жесткая») нить. Для расчета простейших вантовых конструкций на прямоугольном или круглом планах во многих случаях достаточно рассмотреть отдельные ванты с приходящейся на них нагрузкой.
Начальную форму нити целесообразно выбирать подобной веревочной кривой от преобладающей нагрузки на покрытие. Такими нагрузками в большинстве случаев являются равномерно распределенные нагрузки от собственного веса конструкции. Если в дальнейшем на ванты будет приложена равномерно распределенная временная нагрузка, то она также будет равновесной по отношению к выбранной форме нити, а деформации ванты будут связаны лишь с ее упругими удлинениями. Если первоначальная форма не отвечает по своим параметрам форме равновесия от основных нагрузок, то ванты будут испытывать также и значительные кинематические перемещения. При этом пользоваться приближенными уравнениями равновесия нельзя, поскольку они основываются на относительной малости горизонтальных смещений точек ванты.

Отправной характеристикой вант является кроме формы также их первоначальная длина. При этом чаще всего задаются значением стрелки провиса ванты — наибольшей по величине ординаты нити (рис. 2.11.9). Величина стрелки в значительной степени влияет на экономичность вантовых покрытий: чем больше стрелка, тем меньше усилия в элементах конструкции. Однако при этом увеличивается строительная высота покрытия и возрастает деформативность вант при неравновесных нагрузках. Оптимальное соотношение стрелки к пролету находится в пределах 1/10...1/25. Задавшись величиной стрелки, находят первоначальную форму веревочной кривой из уравнения

где z(x) — ординаты нити в исходном состоянии (без нагрузки); М(х) — «балочный» момент; H = Mmax/f0 — распор в ванте; Mmax — максимальный «балочный» момент; f0 — стрелка ванты в месте наибольшего «балочного» момента.
Зная уравнение кривой нити, можно вычислить ее длину L по приближенной формуле

Так, например, для ванты, очерченной по квадратной параболе (форме, приобретаемой под равномерно распределенной нагрузкой), с опорами, лежащими на одном уровне,

здесь l — пролет ванты.
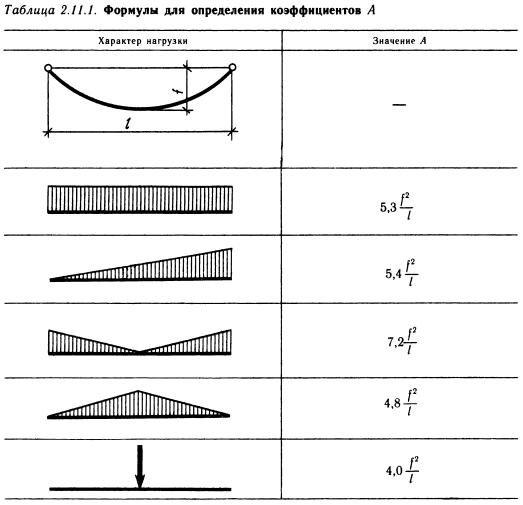
В дальнейших расчетах используется коэффициент А, равный удвоенной разности длины нити и ее пролета:

Для наиболее характерных видов загружения значения А приведены в табл. 2.11.1.
Для вант с опорами, лежащими на разных уровнях (рис. 2.11.10),

где М(х) — балочный момент; H — горизонтальная составляющая опорной реакции (распор), H = Mc/fc; fc — ордината точки с (задается).

Статический расчет гибких и «жестких» вант. На практике встречаются два основных случая работы гибких нитей на поперечную нагрузку: 1) с опорами, находящимися на одном уровне (рис. 2.11.9); 2) с опорами на разных уровнях (см. рис. 2.11.10). С учетом допущений, основанных на пологости применяемых в покрытиях вант и соответствии первоначальной формы нити веревочной кривой основной части нагрузки, усилия в растяжимой ванте с несмещаемыми опорами, расположенными на одном уровне, могут быть определены из кубического уравнения

где l — пролет, нити; R — жесткость нити на растяжение; A = 2(L—l); D = f Q2(x)dx; Q(x) — «балочная» перерезывающая сила.
Для предварительной оценки усилия нить можно принять нерастяжимой, тогда усилие

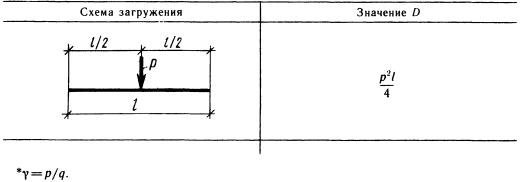
Значения D для наиболее характерных видов загружения приведены в табл. 2.11.2.
Частным случаем провисающей гибкой нити является случай, когда L = l, т. е. A = 0 (нить-струна).

Тогда

Если L меньше l, т. е. первоначальная заготовка ванты короче пролета, усилие в струне

Если опоры нити располагаются на разных уровнях (см. рис. 2.11.10), то усилие распора

где l1 — длина прямой, соединяющей точки опоры;

При податливых опорах усилия в ванте

В случае изменения длины ванты (например, от перепада температуры) уравнение будет иметь вид

где Аt — удлинение нити от температурного перепада.
Соответственно при податливых опорах, лежащих на разном уровне,

Особенностью «жестких» вант является работа последних как на растяжение, так и на изгиб. Чем значительнее жесткость вант, тем больше в них доля изгибных напряжений. Деформативное состояние жесткой нити описывается дифференциальным уравнением

где El — изгибная жесткость ванты; w — прогиб; H — распор в нити; z — ординаты «жесткой» нити в первоначальном состоянии; М(х) — «балочный» момент.
Решение такого уравнения затруднительно, так как в нем неизвестны прогиб и распор.
Момент от равновесной нагрузки, действующий в нити, путем преобразования (2.11.17) можно найти из выражения

где Mв — изгибающий момент в ванте; М(х) — «балочный» момент от нагрузки; K2 = H/(EI); H — распор в ванте; EI — изгибная жесткость ванты.
Распор в ванте определяется, как в гибкой нити.
Расчет на неравновесные виды нагрузок по (2.11.17) приводит к весьма громоздким формулам. В то же время, если распределение нагрузки и прогибов принять по синусоидальному закону, то на некоторые виды загружения с известной степенью приближения изгибающие моменты и прогибы в ванте можно найти по формулам: для временной равномерной нагрузки на полупролете (рис. 2.11.11)


Расчет вантовых систем. Система параллельных вант на прямоугольном контуре Формулы (2.11.7)... (2.11.20) позволяют с необходимой для практики точностью рассчитывать вантовые покрытия на прямоугольном плане с параллельно расположенными вантами с учетом податливости контура и перепадов температуры. По этим формулам возможно находить усилия в вантах не только при равномерно распределенной нагрузке на покрытие, но и в случаях частичного загружения покрытия, выделяя из покрытия отдельную ванту с приходящей на нее долей нагрузки. Податливость замкнутого опорного контура достаточно легко определяется из расчета прямоугольной рамы.

Система радиальных вант на круглом плане. В радиально-вантовых покрытиях на круглом плане усилия в вантах могут быть определены довольно просто при равномерно распределенной нагрузке на покрытие, так как средний узел в этом случае не смещается в горизонтальной плоскости. Выделив любую из диаметрально расположенных вант, можно рассчитать ее на постоянные и временные нагрузки, распределенные по треугольному закону (см. рис. 2.11.12). Найденные усилия распора прикладываются в виде радиально направленной нагрузки к опорному контуру, выполняемому в виде замкнутого кольца.
В опорном кольце возникает усилие сжатия

где H — распор ванты; а — шаг между вантами по внешнему кольцу; l — радиус покрытия.
В случае, если временная нагрузка располагается на части покрытия, средний узел системы смещается, и задачей расчета является нахождение состояния равновесия. В случае расположения нагрузки на половине поверхности радиально-вантовой системы усилия в вантах достаточно просто могут быть определены из кубического уравнения

H0 — распор в ванте, расположенной вдоль оси симметрии нагрузки;
H0 — распор в ванте от постоянной нагрузки;
l — радиус покрытия;
n — число вант; ERбi — сумма «балочных» реакций вант, сходящихся в центральном узле; D+, D-; B+, В- — величины соответственно для загруженной и незагруженной частей покрытия. Прогиб центрального узла можно определить по формуле

где f — стрелка вант.
Смещение узла по горизонтали определяется из выражения

m — число членов разложения в ряд Фурье (обычно принимают 5...9 членов).
Зная перемещения центрального узла, можно определить усилия во всех вантах системы.
Для того чтобы определить усилия в опорном контуре, кольцо рассчитывают с учетом отпора вантовой системы, которая учитывается как упругая среда винклеровского типа. Коэффициент отпора определяется по формуле

R — жесткость ванты.
Радиальные перемещения и изгибающие моменты в любой точке кольца, вызванные сосредоточенной силой, определяются по формулам:

фi — угол между осью симметрии нагрузки и i-ой вантой.
С учетом дополнительного отпора стоек каркаса здания

Для стойки постоянного сечения

где ЕIст — изгибная жесткость стойки; hст — высота стойки.
Окончательный результат получается в виде вектора, являющегося результатом умножения матрицы влияния Ги или Гм на вектор нагрузки Hi (усилий при не-деформируемом контуре).

Система вант и балок. В системе вант и балок (см. рис. 2.11.1, б) внешняя нагрузка распределена пропорционально жесткостям растянутых и изгибаемых элементов. Целесообразно выбирать жесткости таким образом, чтобы равновесная равномерно распределенная вдоль вант нагрузка воспринималась в основном растянутыми вантами, тогда как балки включались бы в работу на неравновесные нагрузки (например, при расположении временной нагрузки на половине пролета вант). При этом нагрузки, приходящиеся на изгибаемые элементы, будут минимальными. Разлагая одностороннюю нагрузку на ванты на симметричную и кососимметричную (рис. 2.11.13), получаем нагрузку на балки равную по интенсивности половине интенсивности односторонней нагрузки. Исходя из этого, с некоторым запасом прочности сечения вант подбирают на полную расчетную нагрузку, а сечения балок — на половину временной нагрузки.
Более точно задача определения усилий в элементах вантовобалочной системы определяется из дифференциального уравнения

Вантовые сетки В общем случае расчет вантовых сеток, имеющих сложную геометрическую форму поверхности и контура, представляет собой трудную инженерную задачу, решение которой возможно лишь с помощью ЭВМ. Важное значение при этом имеет определение самой поверхности сети, в которой может существовать предварительно напряженная система вант. Если в сети имеются зоны с поверхностью нулевой или положительной гауссовой кривизны, то при легких покрытиях на таких участках могут проявляться значительные деформации от ветровой или неравновесной нагрузки, приводящие к расстройству кровли. Иначе говоря, система вант становится нестабилизированной и мгновенно изменяемой. Наиболее часто встречаются на практике седлообразные поверхности отрицательной гауссовой кривизны, которые можно представить как поверхности, описываемые кривой (параболической, эллиптической или др.) при ее движении по кривой противоположной кривизны. При равномерной нагрузке на покрытие равновесной формой вант является параболическая и в этом случае форма поверхности представляет собой гиперболический параболоид. Очертание контура определяется как след пересечения этой поверхности с поверхностями стен здания. В сетчатых седловидных покрытиях несущие ванты располагаются по провисающим кривым, а стабилизирующие — вдоль вспарушенных образующих поверхности.
Уравнение поверхности гиперболического параболоида выражается формулой

где fx, fy, а и b — соответственно стрелки и полупролеты вант, направленных по главным параболам гиперболоида.
Внутренние усилия в такого рода сетчатой оболочке связаны с нагрузкой и геометрическими параметрами дифференциальным уравнением

Кроме того, следует учитывать уравнение неразрывности вант, составляющих сетку:


где Hx и Hy — первоначальные усилия в вантах; lx, ly — пролеты вант; Rx, Ry — жесткости вант на растяжение; ugh, uлев, vпр, vлев — горизонтальные перемещения опорных точек вант (и — вдоль оси х, V — вдоль оси у).
Точное решение систем уравнений (2.11.30) и (2.11.31) при большом количестве узлов вантовой сетки можно найти с помощью быстродействующих ЭВМ.
В программах расчета вантовых сеток на ЭВМ используются шаговые методы, основанные на решении уравнений при малых изменениях нагрузки. В этом случае можно принять линейную зависимость усилий в вантах и их перемещений, что значительно упрощает решение уравнений.
Для приближенной оценки величин усилий в вантах при некоторых видах загружения, для которых линии давления совпадают с формой отдельной ванты или семейства вант, можно применить метод сил. При этом в качестве неизвестного принимается усилие контактного взаимодействия между несущими и стабилизирующими вантами:

Если нагрузка соответствует линии давления семейства несущих вант, то

если нагрузка соответствует линии давления семейства стабилирующих вант, то

Здесь hx1, hy1 — погонные усилия в сетке соответственно в направлениях осей х и у от единичной нагрузки; rx, ry — погонные жесткости вантовой сетки на растяжение в направлении соответственно х и у.
Погонные усилия в вантовой сетке определяются из выражений

где hх0, hу0 — погонные усилия в вантовой сетке от контактного взаимодействия между несущими и стабилизирующими вантами.
Если на сетку из вант, имеющую поверхность гиперболического параболоида, действует равномерно распределенная нагрузка q, то контактное давление между вантами можно найти по формуле

где р0 — первоначальное контактное давление между несущими и стабилизирующими вантами (до приложения нагрузки); l1, l2, f1, f2, F1, F2 — соответственно пролеты, стрелки и площади поперечного сечения несущих и стабилизирующих вант; б — податливость опорного контура.
В частности, при одинаковых геометрических характеристиках несущих и стягивающих вант выражение (2.11.33) запишется так:

Зная контактное давление, можно найти усилие в стабилизирующих вантах (по давлению р) ив несущих (по давлению p+q).
Поскольку в процессе загружения усилия в несущих вантах увеличиваются, а в стабилизирующих уменьшаются, опорный контур седлообразных покрытий на некоторых стадиях будет испытывать моментное состояние. Под нагрузкой происходит «распластывание» контура.
Для уменьшения изгибаемости закрепляют от расползания низшие точки контура путем установки контрфорсов или затяжек.
Из формулы (2.11.33) следует, что целесообразно уменьшение стрелок стабилизирующих вант; при этом усилие в них по мере загружения меняется в меньшей степени.
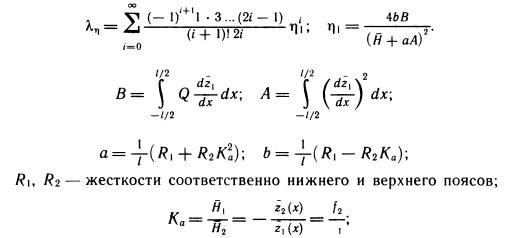
Вантовые фермы Характерной особенностью висячих покрытий с вантовыми фермами является наличие двух систем поясов, между которыми существуют внутренние контактные усилия, передаваемые через элементы решетки. Подобно тому как элементом однослойных вантовых конструкций является гибкая или жесткая нить, основным элементом двухслойных покрытий является вантовая ферма, расчет которой в ряде случаев прост. В случае малых прогибов и неподвижных опор усилия в поясах ферм с достаточной для инженерных целей точностью могут быть найдены по формулам:

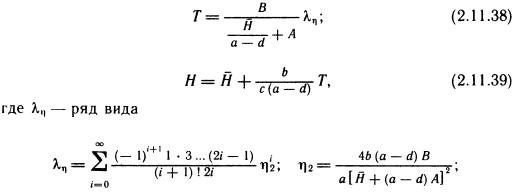
где T = H1 — KaH2', H = Н1+Н2, H = H1+H2 — усилия предварительного натяжения; Лп — ряд вида
Если опоры вантовых ферм упруго-податливы в горизонтальной плоскости, то податливость б учитывается следующими формулами:
На практике приходится рассчитывать покрытия в виде двухпоясных радиально-вантовых систем на круглом плане. Усилия при недеформируемом контуре находятся из выражений:

Pу — сосредоточенная сила, приложенная в центральном узле.

k =/= 2/ (i = 1,2...); m — число разложения в ряд Фурье (5...9 членов).
Уравнения (2.11.41), (2.11.42) решаются методом последовательного приближения.
Смещение центра определяется по формулам:

С помощью найденных перемещений центра, используя уравнения (2.11.41), (2.11.42), можно определить усилия во всех радиальных элементах.
Следует отметить, что усилия в фермах при неравномерных нагрузках на радиально-вантовое покрытие меняются незначительно. Деформации опорного контура оказывают незначительное влияние на усилия в вантах. Изгибающие моменты в опорном контуре могут быть найдены умножением вектора сил на матрицу влияния:

где l — радиус опорного контура; EI — изгибная жесткость опорного контура; G — коэффициент постели упругой среды;

где EIст — изгибная жесткость стойки; hст — высота стойки.

Комбинированные вантовые конструкции. В характерном случае для конструктивной системы, состоящей из верхнего жесткого и нижнего гибкого поясов (рис. 2.11.14), усилие распора в поясах находится по формулам:
- при равномерной нагрузке на всем пролете

- при равномерной нагрузке на половине пролета

где ЕбIб — изгибная жесткость балки; EбFб — продольная жесткость балки; EвFв — продольная жесткость ванты (нижнего пояса); f — стрелка провиса ванты.
Вычислив значения распора H и «балочного» момента М(х), изгибающий момент в балке шпренгельной системы можно найти из выражения

где z(x) — ординаты шпренгельного пояса.
Другие новости по теме:
Информационный некоммерческий ресурс fccland.ru ©
При цитировании информации ссылка на сайт обязательна.
Копирование материалов сайта ЗАПРЕЩЕНО!
При цитировании информации ссылка на сайт обязательна.
Копирование материалов сайта ЗАПРЕЩЕНО!